以前の「ひとこと」 : 2026年7月前半
| Sun | Mon | Tue | Wed | Thr | Fri | Sat |
| 1 | 2 | 3 | 4 | |||
| 5 | 6 | 7 | 8 | 9 | 10 | 11 |
| 12 | 13 | 14 | 15 | 16 | 17 | 18 |
| 19 | 20 | 21 | 22 | 23 | 24 | 25 |
| 26 | 27 | 28 | 29 | 30 | 31 |
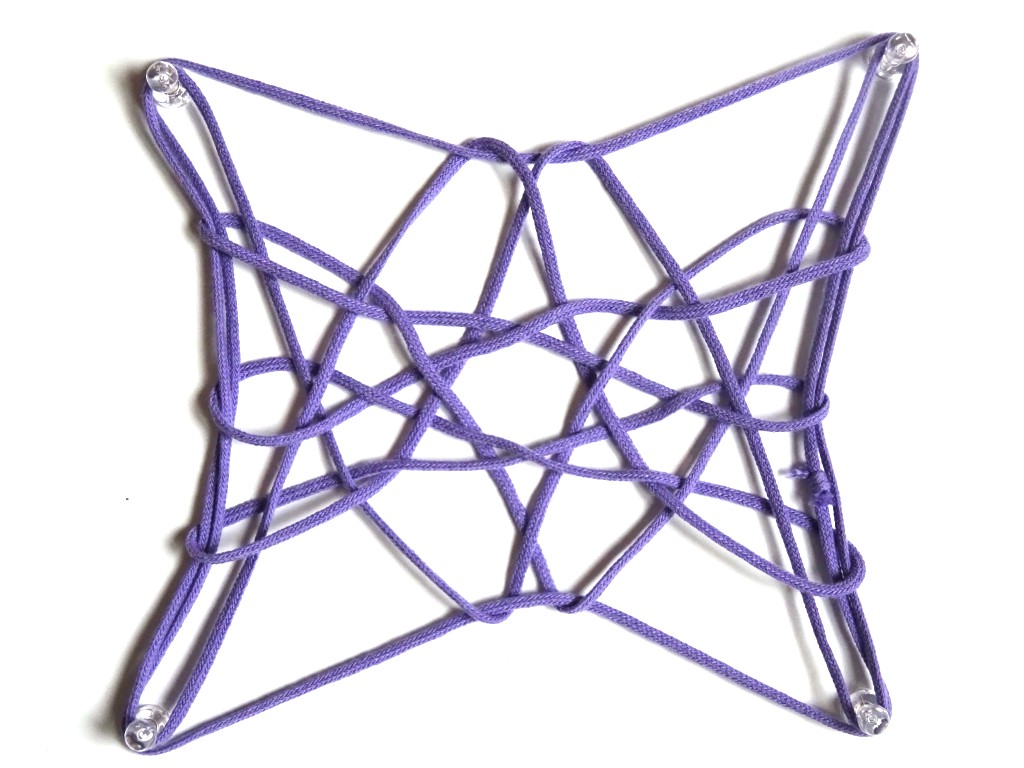
7月1日(水) 創作あやとり作品「連星」
7月になりました。今年も後半に入りました。
シシドユキオさんの創作あやとり作品「連星」です。

|
| 「連星」(1981 SHISHIDO Yukio) |
1981年10月に刊行されたあやとり協会会報「あやとり」No.8(SFAJ8)の宍戸行夫さんの「あやとりマンダラ(2)」pp.27 に掲載されている作品です。この記事で紹介されている作品は、2021年11月にいくつかご紹介していましたが、この「連星」はなかった気がします。この作品は好きです。手順もシンプルで、中指の構えから中指を向こうへ半回転ひねって、左右の中指の輪を交換してから(このとき左の輪が右の輪を乗り越えるようにします)、「エイト展開」を2回、です。左右中指の輪の交換のとき、どちらを外側にするか(相手の輪を乗り越えるのがどちらか)が重要です。輪の交換の結果、中央の絡みがひとかたまりになってしまっていたら失敗です。
人差し指の構えや中指の構えで輪をひねらずに左右の輪を交換する操作であれば、外側にする輪を間違えると絡みができずに外れてしまって「はじめの構え」に戻ってしまうので失敗したことがわかるのですが、ひねってから交換すると、外側にする輪が違ってもすぐには気が付かないので、最後まで取ってみて「おかしい、完成形にならない」と悩むことになるのです。
ブックオフで「世界の湖」という本を買いました。初版1993年、再版2001年というちょっと古い本です。専門書なので定価は3,300円なのですが220円でした。

|
| 「世界の湖」 |
滋賀県琵琶湖研究所というのがあるのですね。この本は世界の主要な湖について、人間の生活にどのように関わってきたのか、現在どのような環境問題があるのか、という視点で論じられた論文を集めたものです。本の冒頭の15ページくらいまでがカラー写真のページで、紹介されている湖の写真が載っています。
表紙をめくった直後の見開き(「見返し」と呼ぶのでしょうか)に、この本で紹介されている湖の一覧が載っています。日本の湖はありませんが、本の最後の章(8章)が「世界の湖と琵琶湖」というタイトルで、それまで論じられてきた様々な湖と琵琶湖を比較して琵琶湖の現状と将来について語られています。

|
| 掲載されている湖の一覧 |
再版の段階ですでに四半世紀前ですが、汚染が進んだり砂漠化が進んで湖が縮小したり、という話がたくさんでてきて心配になります。今はもっとひどい状況になっているのだろうか、と思ったりします。
現地に行ってみたいとは思いませんが、湖がどんな様子なのか、そこで人々がどんな暮らしをしているのか、というのを読むのは楽しいです。
<おまけのひとこと>
しっかりした装丁の本の見返しの地図というと、児童文学などで物語の舞台の地図が載っているものがあって、わくわくして眺めたものでした。特に「アーサー・ランサム全集」は、読み始める前に最初に物語を読む前に地図を見て、「あ、いつもの湖が舞台なんだ」と思うと嬉しかったものです。全12巻のうち、1,2,4,6,11巻の5冊が同じ湖が舞台でした。
7月2日(木) あやとり研究中、人とロボットが協調して音楽を演奏する研究
今日はあやとりの話です。
四本指の「ダンスの舞台」の変化を調べているときに偶然できた創作あやとりです。糸の交差を整えてみたら、中央部分がおもしろいなと思ったのです。

|
| 使用紐 3m:中央のパターンを整えたもの |
短めの紐(とはいえ2.4mは普通に使われるあやとり紐よりかなり長いですが)で取ると中央のパターンを広げる余地はあまりなくて、ぎゅっと引き絞られたかたちになりがちです。

|
| 使用紐 2.4m:強めに引き絞ったもの |
この変化ももう少し調べてみたいと思っています。
最近のロボット+AIの研究はどんどん進んでいて、フォローしておきたい論文がたくさんあって手が回りません。 arXiv に Co-policy: Responsive Human-Robot Co-Creation for Musical Performances(Xuetao Li, Wenke Huang, Mang Ye, Zijian Liu, Jinhua Xie, Jifeng Xuan, Miao Li:2026年6月18日)という論文が公開されていて、すごいな、面白いなと思いました。
- 人間とロボットが music-bell (hand-bell)のような楽器を一緒に演奏する
- ロボットは電子音を再生するのではなく、実物の「チャイム」をたたいて音を出している
- 人間とロボットが音声対話しながらどんな演奏をするのかを決める
- ロボットは視覚情報、聴覚情報(人間が出した楽器の音と、人間が言葉で指示した音声)を入力として、 即興で適切と思われるタイミングで適切と思われる高さの「チャイム」をたたく
こちらのhttps://xtli12.github.io/Co-policy/docs/に、実際に人間とロボットが音声で対話しながら一緒にチャイム(鉄琴みたいなもの)を演奏している動画があります。
これ、ロボットの「身体」がなかったとして、電子音で再生するだけだとしても人間と対話しながら適切なタイミングで適切な高さの音を出すのは簡単ではないのです。それを、実際にロボットの手で持っている「ばち」を使ってベルを叩いているのがすごいです。音楽の演奏なので、タイミングはとてもシビアです。従来、ロボットに作業をさせるタスクでは、作業のスピードやタイミングはロボットに任せられており、作業終了までの時間は問われても、外界と同期を取って動作するようなことはあまり考慮されてきていませんでした。球技をプレイするヒューマノイドなども徐々に公開されはじめていますが、楽器演奏の場合はたった1回のタイミングを合わせるのではなく、叩いて音を出すイベントは1秒より短いタイミングで次々と実施しなければなりません。
中国の武漢大学で行われている研究のようです。ヒューマノイドのアクロバティックな動きよりも恐るべき研究成果だなあと思いました。こんな研究ができるという点でそもそもかなわない気がします。
<おまけのひとこと>
コンピュータが身の回りには全くなかった時代から、今のAIの普及する時代までを実体験できたことはとてもよかったなあと思っています。でも、これからの世代はもっともっととてつもない技術の進化の中で生きてゆくのですね。この変化、自分はあとどのくらい見ていられるのだろう、できれば社会や自分たちの生活がよりよくなっていってほしいなあと思います。
7月3日(金) 伝承あやとり「はたおり」
今日はあやとりの話です。
あやとり協会の吉田さんから伝承あやとりの機織り(リンクは石野さんの「あやとりしてみよう」の機織りのページです)について、面白いコメントをいただきました。先日、斜め格子の斜めの糸が親指小指の外周の上側(手前側)なのか、下側(向こう側)なのか、という話に関連したコメントです。
「はたおり」の始め方はちょっと変わっていて、両手首にあやとり紐を掛けて、手前の糸、向こうの糸をそれぞれ左右の手首に巻き付けるところから始めます。
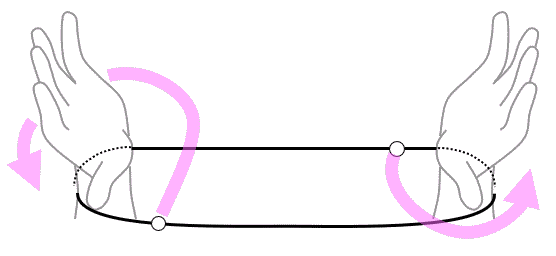 |
| 「はたおり」の最初の手順 |
「人差し指の構え」の上に中央が絡んだX字型のパターンができていて、両手の掌を手前に向けたり向こうに向けたりすることで、中央の絡みが手前に来たり向こうへ行ったりします。

|
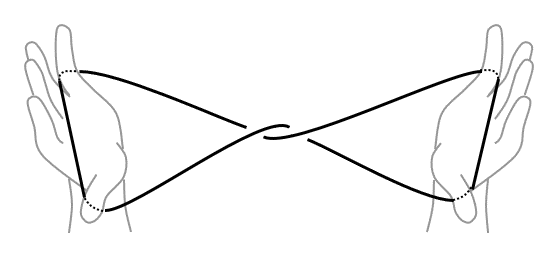
| 「はたおり」 |
機織り機の動きをイメージできるすばらしい伝承作品だと思います。
吉田さんからいただいたコメントは、「中央が絡みのはじめの構え」(下図)から、掌の糸を人差し指(もしくは中指)で取り合うと、「はたおり」と似た構造が作れる、というものでした。
 |
| 中央が絡みの「はじめの構え」 |
この取り方だととても簡単ですが、でも前後に動くパターン(機織りの横糸に相当)と「人差し指の構え」のパターン(機織り機の経糸に相当)が離れてしまうので、「はたおり」っぽさは失われてしまいます。

|
| 「はたおり」? |
静止画のgifアニメーションだと違いがわかりにくいかもしれません。
吉田さんからは、この違いは「手の指の付け根の形にあると思うのです。手の指の付け根のカーブが、「はたおり」をあやとりとして成り立たせていると思いました。」というコメントをいただきました。その通りだなあと思ったのです。「はたおり」は、「人差し指の構え」のパターンの親指・小指が低くて人差し指が高いので、「上に凸」になっています。そのため、可動部が上に凸になったカーブに沿って動くのです。
では、上下が逆の「はたおり」は、逆に中央の糸が低くて両側(親指・小指に相当)が高ければよいのでしょうか? 親指・小指の輪を人差し指と薬指の先端に移して、中央の中指の輪は指の根元にすることで「下に凸」になるようにしてみました。

|
| 「はたおり」? |
内側の3本の指で取るので間隔が狭いのと、指の根元・先端の位置がずれてしまいやすいので動かしてみると不安定です。あんまりよくありません。
それならば、「中央が絡みのはじめの構え」から、中央の絡みの下で、掌の糸を人差し指で取りあうほうがよさそうです。手首に巻き付ける状態から始めるのと比べて簡単になっているとは言い難いですが。
この「はたおり」は野口先生の「あやとり」で覚えたのですが、「とにかく手首に糸を巻き付ければ良い」という間違った覚え方をしたので、左手首も右手首も手前の糸を巻き付けてしまったりしたのです。そうすると中央が絡みにならず、ただの「人差し指の構え」になってしまうのです。小学校低学年のころはこれがなぜなのか(なぜうまくいくときと失敗するときがあるのか)がわからずに悩んだものでした。
<おまけのひとこと>
今年の6月はだいぶ涼しかったので、今年はまだ自宅のクーラーを使っていません。晴れた日に窓を閉め切っているとダメですが、風を通せれば室温が27℃以上になることはありません。今も窓を開けています。カッコウの声とキジの声がよく聞こえています。それ以外の小鳥の声もいろいろ聞こえますが、確実に聞き分けられるのはカッコウとウグイスとキジとカラスとハトとスズメくらいです。
7月4日(土) 「かこさとしの科学絵本」
絵本の話です。
有名な絵本作家の加古里子(かこさとし)さんは1926年生まれで、今年で生誕100年なのだそうです。それを記念してこんな本が出版されたそうで、妻が図書館で借りてきてくれました。

|
| 「かこさとしの科学絵本」 |
なつかしい絵本がたくさん取り上げられて解説されていて、ノスタルジーを感じました。

|
| 「どうぐ」 |
「どうぐ」はとても好きな絵本でした。冒頭に「あなたのいえにはどうぐはありますか?」「さてこまったぞ、どうぐってなんだろう?」「わたしのいえにはどうぐなんてないわ」といったような会話からはじまって(手元に本がないのでうろおぼえです)、人間は何をするにもたくさんの道具を使っていることが説明されます。圧巻なのがきれいな自動車の絵が出てきて、「この自動車だって…」といってページをめくると、自動車を構成する部品が見開き一面に描かれていて圧倒されたものでした。こちらのかこさとし展 子どもたちに伝えたかったこと(2022.07.29)というページの下のほうにその画像が紹介されています。

|
| 「でんとうがつくまで」 |
これもすばらしい絵本でした。「じしゃくがぐるぐるまわるとでんきがつくられるのです」というところから、どうやってじしゃくをぐるぐるまわすのか、ということで水力発電の原理を説明し、火力発電の原理を説明します。ガスコンロの上に載せられたヤカンの口から蒸気が噴き出して、それをタービンで受け止めて磁石を回転させるイラストが印象的でした。さいごに、「もっとほかにでんきをつくるやりかたはないでしょうか? ワンちゃんをぐるぐる走らせるのではかわいそうですよね」といって口輪をはめた犬が目の前に吊るされたエサに向かって走り続けるイラストがありました。風力発電や潮汐発電を実用化しようとして取り組んでいる人たちがいます、ということが書かれていた気がします。

|
| 「あなたのいえ わたしのいえ」 |
これは子供のころは持っていなかった絵本なのですが、とても好きで図書館などでよく読んでいました。そのせいで、再版されてハードカバーになってものを先日見かけてつい買ってしまいました。2022年9月22日にご紹介しています。

|
| 「ごむのじっけん」 |
これも強く印象に残っています。割り箸の先に輪ゴムをぐるぐる巻きつけたものでいろいろ実験をするのです。輪ゴムがない割り箸と輪ゴムを巻いた割り箸で机をたたいて比べてみたり、輪ゴムの上から墨を塗って、乾いたら輪ゴムを外して墨が通っていないことを確かめたりするのです。机をたたく実験からわかるゴムの性質として、「あたりをやわらかくする」と書かれていて、いったいこれはどういう意味だろう?と不思議に思ったのでした。今ならば「衝撃を緩和する」という意味なのだとわかるのですが、当時は「あたり」という言葉は「周囲」「周辺」としか解釈できなかったので、突然どうしてこんなことを言っているのか、さっぱりわからなかったのです。でも、わからなかったがゆえにこんなに記憶に残っているのだと思います。
墨を塗る実験のほうは「水を通さない」という性質を説明する内容でした。こういう実験の例を通してゴムの様々な性質を説明して、身の回りのゴム製品がそれらの性質のうちのどれを活用して使われているのか、が楽しいイラストとともに短い文章で語られているのです。

|
| 「はははのはなし」 |
これも印象的でした。乳歯と永久歯の本数はこの絵本で覚えました。虫歯のイラストが良い意味で怖かったです。
この「かこさとしの科学絵本」、取り上げられている絵本の表紙の画像を見ただけで、上に書いたようなことがいろいろ頭に浮かびました。本文をまだあまり読んでいないのですが、これだけで十分に楽しいです。
ちなみに、ある本の裏表紙にこんなイラストが使われているのだそうです。(本文を読んだのですが、いくつかの絵本の内容を再編した本があるようなのですが、それらのうちのどの本なのかよくわかりませんでした。)

|
| だんめんず |
注目したのはこのイラストの中で、お父さんと娘があやとりを取っているところです。ここであやとりが登場しているのが嬉しかったのです。
<おまけのひとこと>
今の時代の子供たちはどんなコンテンツに触れて育つのだろうと思いました。きっと昔よりももっとわかりやすくて素晴らしいものもたくさんあるんだろうな、と思います。一方でおそらく膨大な量のコンテンツがあって、広く知られてロングセラーになって生き残るのはとても難しい時代なのだろうなとも思います。
7月5日(日) 整理整頓
週末なので日常の話です。
自分の本や各種ブロック玩具、作り貯めてきた紙の多面体などを収納している3畳くらいのスペースがあるのですが、いろいろなものをとりあえず仮置きしていたら、足の踏み場がなくなった状態になっていました。この週末、重い腰を上げて片付けることにしました。当たり前なのですが自分の好きなもの、お気に入りのものばかりで、改めて整理整頓しようとするとついつい手に取って読んでみたりいじってみたりしてしまいます。高々これだけのスペースの整理にまるまる半日以上かかりました。

|
→ |

|
| 整理する前(7月4日(土)) | 整理した後(7月5日(日)) |
本の並びも少し変えました。このスペースの外にも本とか楽譜とかの書棚があり、地下室にも本があります。そろそろ不要な本は処分しないといけないなあと思い始めました。
この部屋は地震が発生したらすぐに逃げ出さないと危険です。落下防止対策を何かしようかと思わないでもないですが、利便性が下がるので有事の際は自分の身を優先して、モノが落下するのはあきらめようと思っています。重たいものはできるだけ下に置くように考えるのですが、本はそうも言っていられません。
天井までの作り付けの棚が欲しいなと思って設置してもらったのは2020年のことでした。

|
→ |

|
| 2020年10月30日 (工事前日) | 2020年10月31日 (工事当日) |
本は重たいので、かなり丈夫な棚をお願いしました。紙模型のケースもたくさん入れるので、奥行きも取りました。本が入らなくなって二列にいれているので、後ろの本が見えないのがちょっと不便です。
この棚の工事をしたのはいつだったっけ?と思って昔の写真をPCの中で探してみたのです。4〜5年以上前だと思うけれど、10年以上前ということはないよなあと思って写真を順に確認しました。2016年11月1日に封筒から折った「ゴミ箱」シリーズという記事を書いていて、この写真が棚工事をする前にこの部屋で撮ったものだということがわかりました。記事では画像をトリミングして載せていますが、もともとの写真はこんな感じでした。

|

|
|
| 2016年10月30日 | ||
改めて、思い切って作り付けの棚をつくってしまってよかったと思っています。
<おまけのひとこと>
更新がお昼過ぎになってしまいました。
7月6日(月) あやとり画像をモノクロに変換
あやとりの雑誌記事の準備の話です。
この週末(7/4〜7/5)は「あやとりの楽しみ」の記事の準備のための画像や図面やCGの作成をしていました。もともと、すぐに出せる原稿のストックは複数用意してあるのですが、それよりも優先度が高い(書きたい)内容が出てきたので、その準備をしています。誌面ではカラー画像は使えないので、写真はグレースケールに変換するのですが、元画像(カラー)ならば色の違いであやとり紐が目立っていたのに、グレースケールに変換すると紐が背景と輝度が近くて見えにくいということはよくあるのです。
紐の太さ、色、長さ、によって同じ素材でも滑りやすさや硬さが異なり、うまく狙ったかたちが作れたり作れなかったりするのです。かたちとしてはこの写真が使いたいのだけれど、グレー画像にすると見えにくくて困る、ということがあるのです。色の濃いあやとり紐を使って同じかたちを作り直しても、気に入ったバランスのかたちにならなかったり、今度は紐の色の微妙な諧調がつぶれてしまって紐の交差の上下がわかりにくくなってしまったりします。誌面では小さな写真に過ぎないのですが、一枚一枚こだわって作っています。
たとえばこんな写真が撮れました。(多分これは誌面では使いません。)

|
| オリジナルの写真 |
何も考えずにこの写真をグレースケールに変換するとこうなりました。御世辞にも「見やすい」とは言えません。

|
| グレースケールに変換 |
元画像をガンマ補正をして全体に明るくして背景(マグネットボード)を白っぽくして、さらにコントラスト強調をかけて明るい部分はより明るく、暗い部分はより暗くする処理をしてからグレースケールに変換してみました。

|
| グレースケールに変換(その2) |
だいぶ見やすくなりましたが、紐の色をもう少し濃くしたいのです。
元画像にもどって、そこからまずRGBの緑のチャネル(輝度情報)だけを取り出して、それをもとにヒストグラム補正をかけてみました。

|
| グレースケールに変換(その3) |
これならまあいいかなあと思えるものになりました。(でも結局この画像は没になりました。)
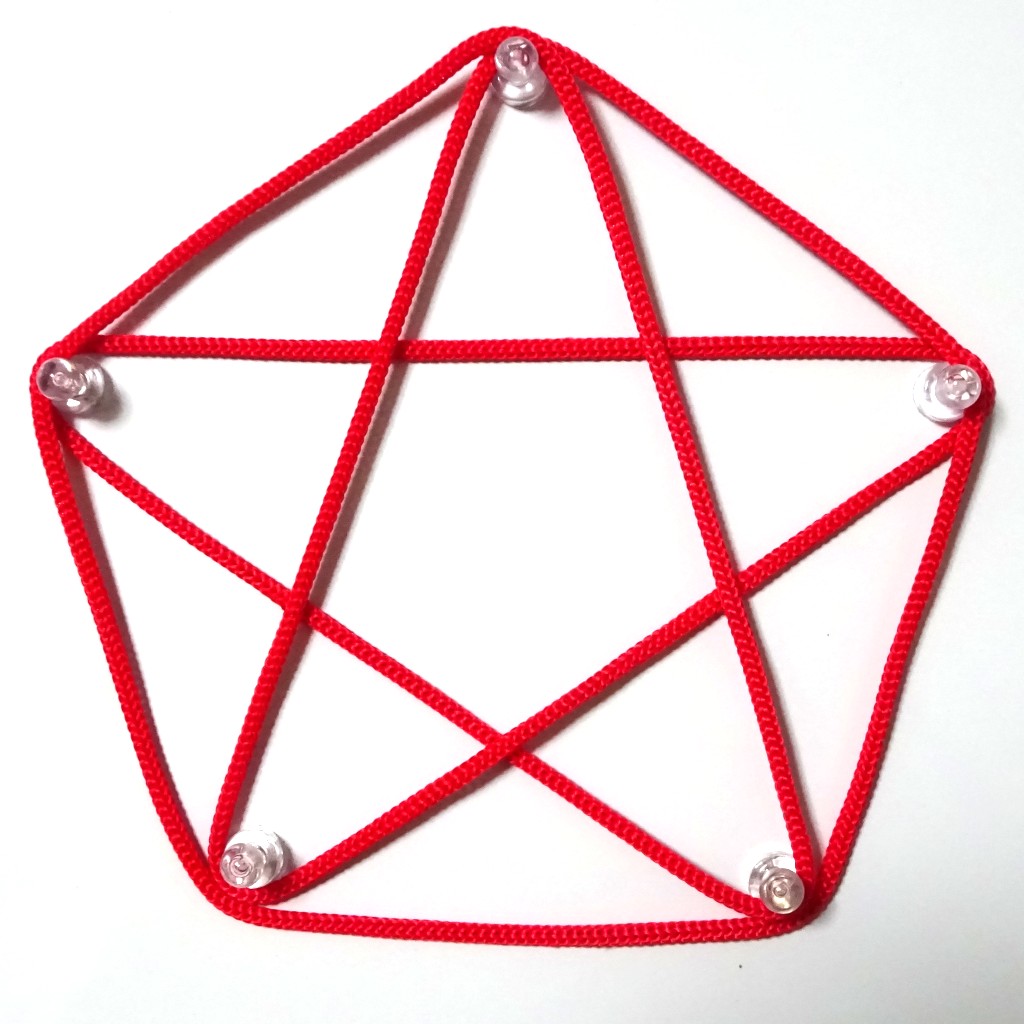
あやとりを取って、ちょっと面白いと思うかたちができると、マグネットボードに固定して写真を撮ってみます。ボードや紐が余っているときは、しばらくそのまま飾っておいたりします。ボードや紐が足りなくなってくると、その時点で飾ってあるもののうちどれかを外して再利用します。昨日、換気のために収納の扉を開けていたのですが、ふと見るとあやとりを固定している4つのマグネットのうちの一つが妙に光っているのです。

|
| 透明チェスピース型マグネットが光っている? |

|
| 透明チェスピース型マグネットが光っている? |
これは透明な樹脂製で、頭部が直径12mmくらいの球形をしています。これがレンズのように光を屈折して、こんな風に光って見えるのです。
家にあるお酒のストックが底をつきそうになってきたので買いに行きました。キリンホールディングスがサッカー日本代表のパートナー(スポンサー)になっているようで、販促グッズとしてワールドカップ日本代表に関係したものがいろいろ付いていたりしました。
ふと見ると、こんなオブジェが飾られていました。キリンビールのいろいろな銘柄の段ボールケースを切って作ってあるようです。五角形は穴として、六角形だけで構成しているところが良いと思いました。

|
| サッカーボールのオブジェ |
これは、キリンホールディングスが作り方をアナウンスしているのか、それとも酒類販売のチェーン店の本部が作り方を各店舗に展開しているのか(行ったのは長野県のローカルチェーンの「酒のスーパータカぎ」です)、それともたまたまこの店舗で独自に工夫したものなのか、どうなんだろう?と思いました。 店舗独自の工夫だったらすごいなあと思います。
<おまけのひとこと>
「酒のスーパータカぎ」は、長野県内だけに展開しているローカルチェーンなのだそうで、県内に30店舗を構えているそうです。なので県外の方はご存じないかと思います。最後の「ぎ」だけひらがななのですね。
7月7日(火) 伝承あやとり作品「おまもり」の途中の状態
あやとりの話です。
日本の伝承作品に「おまもり」(リンクは石野さんの「あやとりしてみよう」の該当ページです)という対称性が高いあやとり作品があります。手順も対称性が高いですし、ちょっと独特な取り方がでてきます。世界あやとり紀行 精霊の遊戯(著者 シシドユキオ、野口廣、マーク・A・シャーマン:2006年) に写真と共に手順が丁寧に説明されています。
この作品、途中にもきれいなパターンが現れて、取るのが楽しいのです。最初に「ふたりあやとり」の「網」を作ります。

|
| 「おまもり」の途中図:「網」 |
操作を続けていって、斜めの紐が二重になった状態を作ります。

|
| 「おまもり」の途中図:二重の「網」 |
最後の操作の直前の状態です。外周の長方形が二重の糸になっているのですが、それが各辺の中央で交差していて、その交差にあやとり図形の内部からの紐が絡んだ構造になり、内部は斜め交差のパターンになっています。このかたちもひとつの完成形だと言ってもよいくらいです。

|
| 「おまもり」の途中図:最終形の直前の状態 |
上の状態から一気に全体を中央から外側に反転するような操作をするのです。

|
| 「おまもり」の最終形:引き絞る前 |
冒頭の「あやとりしてみよう」のページには「おまもり」の最終形のかたちが載っていますが、その状態になる前の上の写真のような整え方も好きです。上記の4つの写真は、「おまもり」を取る手順の途中に現れる対称性がたかいかたち、です。
ここで使われているテクニックも何か他の応用ができないかな、と思うのですがまだ面白い活用方法は思い付いていません。
<おまけのひとこと>
書棚を整理したとき、不要な本をブックオフに持って行って処分しました。昔は本を手放すということは考えたことがありませんでした。でも、後々いつか誰かが片付けることになる(もしくは建物ごと産業廃棄物として処理される?)ことを考えると、不要な本は処分を進めたほうがよさそうだと思うようになりました。とはいえ子供のころからだいじに持っている本はまだ手放せないです。
7月8日(水) Robert J. Lang氏の折り紙作品 op.703
折り紙の話です。
有名な折り紙作家のロバート・J・ラング氏のサイトに、When Rebecca Met Shuzo 3, Opus 703というページがありました。折り紙の世界では有名な藤本修三氏の「藤本キューブ」という作品がありますが、そのオマージュ作品だと思います。これは3番目の作品で、op.701, op.702も類似の構造の作品のようです。
pdfを公開して下さっているので、ありがたく利用させてもらって自分でもひとつ折ってみました。

|
| Robert J. Lang op.703 |

|
| Robert J. Lang op.703 |
上下の部分は藤本キューブそのものの構造ですが、真ん中が「ひとひねり」されています。面白いです。
<おまけのひとこと>
これは今年の3月くらいに作ってあったのですが、まだご紹介していませんでした。シリーズ3つを全部作ってから載せようと思っていたのですが、なんとなく手が止まっていました。
7月9日(木) 半減ニム(その1)
アブストラクトゲームの話です。
昔、このサイトを開設した直後くらいのころ、2001年5月に、ニム(Nim)というゲームを簡単にご紹介したことがあります。
おはじきでも碁石でもコインでもカードでも良いのですが、同じもの(トークン)をいくつか準備して、それをいくつかの山(パイル)に分けます。たとえば、トークンを15個用意して、それを5個ずつの3つの山に分けたとします。プレーヤーが二人で対戦するのですが、自分の手番の時、1つの山を選んで、その山から1つ以上のトークンを取ります。全部取ってその山を空っぽにしてもかまいません。自分の手番のときに取るべきトークンがひとつも残っていなかったら負けです。言い換えると、最後のトークンを取った人が勝ちです。自分が取ったトークンの数の大小は勝敗には関係ありません。(取ったトークンはあくまでも山から取り除いただけで、自分のものになったわけではありません。)
なお、勝利条件が全く逆のルールで「最後の1個を取らされたほうが負け」というルールでプレイされることもあります。
自分の手番になったときに山が1つだけになっていたら、その山を全部取ることができるので「勝ち」です。山が2つだったら、自分の手番のときには常に2つの山の数が同じになるように取れば自分が必ず最後の1つを取ることができます。山が3つ以上になるとちょっと大変ですが、たいへんきれいな「必勝パターン」の計算方法があります。(25年前にはNetにはあまり情報はなかったのですが、今はいくらでもあります。)
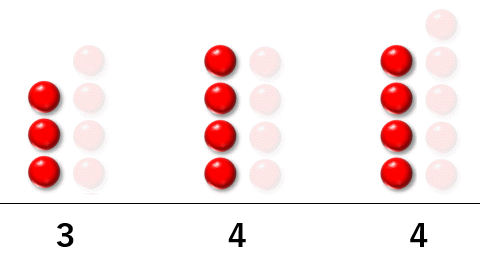
このニムというゲームの別表現として、将棋の香車のように好きな数だけ前に進めるけれど、後ろには下がれないコマを考えて、自分と相手のコマが向き合った状態からプレイすることができます。山をくずすタイプのニムでは山を1つ選んで1つ以上好きなだけのトークンを取る操作をしましたが、香車タイプのニムでは、自分のコマを1つ選んで、最低でも1つ前進、最大で相手のコマの目の前まで動かす、というのが自分の手番での操作になります。(相手のコマを取ったり飛び越えたりするのは反則です。)
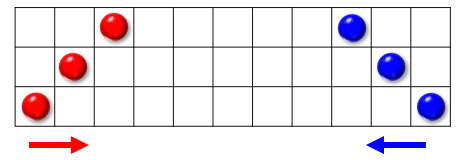 |
| ニムの別表現:状態{5,7,9} |
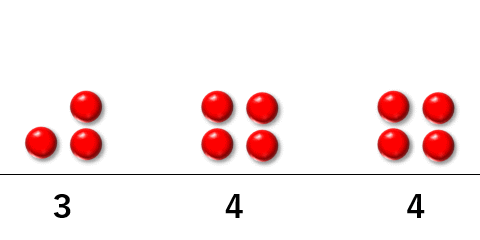
これを当時、自宅のフローリングのパターンをゲーム盤にして遊んでみようとしたのですが、当時幼かった(未就学だった)子供たちにはうまくルールを説明できなくて面白さを伝えることができませんでした。

|
→ |

|
| 5-5-5 | 2-1-3 |
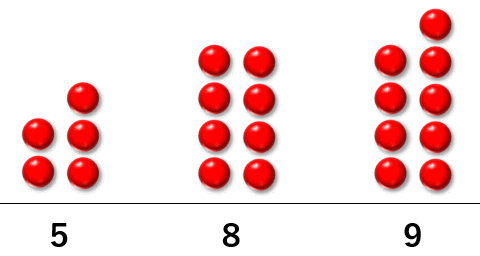
なぜこのゲームの話を急にしたかというと、「半減ニム」という、ニムに新たなルールを追加したゲームを知ったためです。新たな追加ルールは、自分の手番のときに、従来のニムと同様に「1つの山を選んで、その山から1つ以上のトークンを取る」か、もしくは「すべての山のトークンの数を半分にする」か、のどちらかを選べる、というものです。後者を「半減操作」と呼ぶことにします。
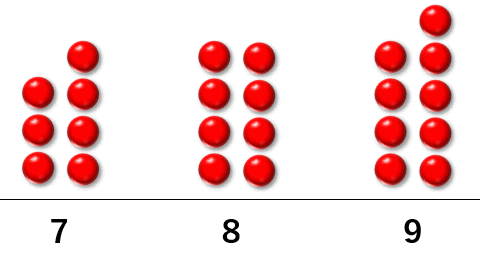
半減操作では、山のトークンが偶数個ならば単純に半分にします。奇数個の山ならば、1つ減らしてから半分にします。山のトークン数が 2k もしくは 2k+1 のときに k 個にするのです。
実例をちょっとだけ見ていただきましょう。三山で、数は7,8,9だとしましょう。たとえば左の山を選んで、そこから2つ取ったとします。そうすると 5,8,9 になります。従来のニムの操作です。取るのは1個から7個までのうち、好きな数でかまいません。
 |
左の山から 2つ取る → |
 |
| 半減ニム:状態{7,8,9} | 半減ニム:状態{5,8,9} |
もし、7,8,9 の状態で「半減操作」を選んだとするとこうなります。結果は 3,4,4 になります。
|
半減操作 → |
 |
| 半減ニム:状態{7,8,9} | 半減ニム:状態{3,4,4} |
「半減操作をすると次にどうなるのか」がわかりやすいように、それぞれの山は2列にしておくと良いと思います。
 |
| 半減ニム:状態{3,4,4} |
まずは二山で考えてみましょう。従来のニムは二山の必勝パターンはとてもシンプルでした。半減ニムだとどうでしょうか?
<おまけのひとこと>
2001年に撮った写真は画素数が 1280×1024でした。スマートメディアという記憶媒体を使っていました。
7月10日(金) 半減ニム(その2)
昨日のつづきです。
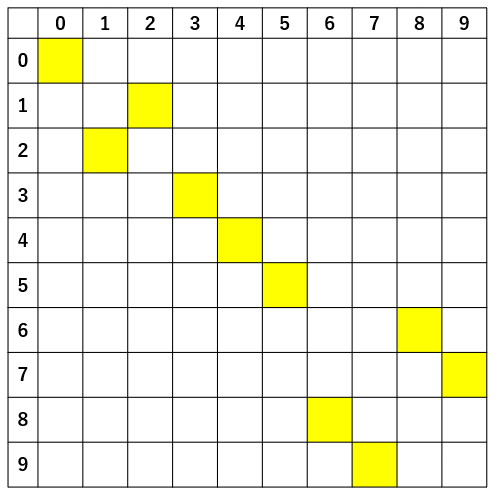
昨日ご紹介した「半減ニム」を、まずは二山の例から調べてみましょう。二山の場合、2つの山の石の数を座標のように表すのが便利です。まず、通常のニムの二山の例を図示してみます。
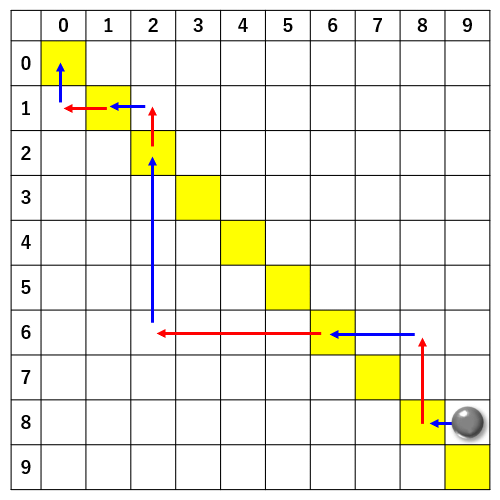
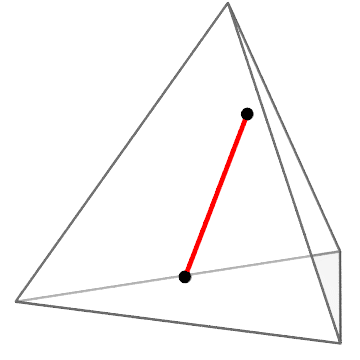
下の図は、右方向に1つ目の山の石の数、下方向に2つ目の山の石の数を取って、ゲームの現在の状態をこの表の中の1点(1つのマス)で表現したものです。今、(9,8)の場所にマーカーが置かれていて、山の石の数が9個と8個であることを示しています。プレーヤー青が石を1つ取って(8,8)にしました(青の矢印)。プレーヤー赤が別の山から2個取って(8,6)にしました(赤の矢印)。
 |
| 図 1:二山ニムの状態遷移表示 |
以下同様にゲームが進んでいって、最後に青が(0,0)に到達してすべての石が取り除かれ、次の手番である赤はとるべき石が残っていないので負けました。このように表示することで、ゲームの途中経過(状態遷移)をひとめでわかるように記録することができるのです。(山が2つしかないので図示が簡単ですが、山が3つ以上になるとちょっと困ります。)
図1で、対角線上に黄色い色を付けています。これは p-position と言って、「その状態を作った人が(それ以降適切にプレイすれば)必ず勝てる状態」を示しています。プレーヤー赤は黄色から外れる手しか選ぶことができず、プレーヤー青はどの状態からでも必ず黄色のマスに戻る手を選ぶことができます。当然、黄色から黄色の遷移はできません。
このように、通常の二山のニムの場合は「2つの山の石の数を常に同じにする」というシンプルな必勝戦略がありました。
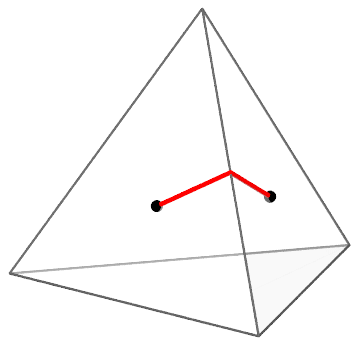
次に、二山の「半減ニム」について調べてみます。同様に二つの山の石の数の上限を9個まで調べてみると、さきに結論を言うと、「半減ニム」の p-position は図2のようになっています。つまり、自分の手番の時にこの黄色いマスに入るような手を打っていれば必ず勝てるのです。
 |
| 図 2:二山の半減ニムの p-position |
2つの山の区別はないので対角線に対して対称です。対角成分のうち、(3,3), (4,4), (5,5) はp-positon(必勝パターン)ですが、(1,1), (2,2), (6,6), (7,7), (8,8), (9,9) は、逆にその状態を作ってしまうと(相手が最善手を打てば)負けてしまいます。なぜそうなるのか、具体的な例で考えてみます。
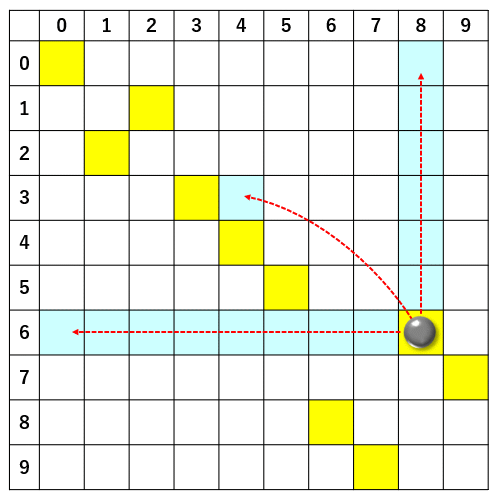 |
| 図 3:(8,6)から選べる手 |
今の状態が(8,6)だとします。通常のニムの操作では、どちらか一方の山を選んで好きな数だけ石を取ることができました。図3では上方向もしくは左方向の矢印が示していて、その場合の行き先を水色のマスで示しています。また、この状態で半減操作を選ぶと、(4,3)になります。その遷移先も水色で示しています。どの手を選んでも黄色のマスには遷移できません。
この、図3のすべての水色のマスから、必ず p-position (必勝パターン)に行かれることを図4で示しました。
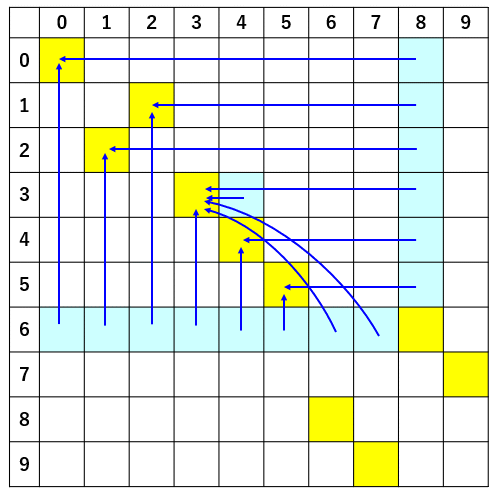 |
| 図 3:(8,6)から可能な遷移先から、p-positionを維持する手 |
まず、普通のニムの操作で、まっすぐ上かまっすぐ左に行くことで黄色のマスに到達できる状態がほとんどです。例外は (7,6) と (6,6) のマスで、ここは通常のニムの操作では p-position に行かれません。(うっかりそういう操作をしてしまうと、相手が最善手を打ったら負けてしまいます。)ただ、この2つの状態は半減操作をすれば黄色いマスである(3,3)に遷移できるのです。
このように半減ニムでは二山でもシンプルではありませんでした。この話題、もう少しだけ続けます。
arXivに、Automation Without Understanding(Jun-Yong Park:2026) という論文があって、ブラウザの翻訳機能を使って読んでみました。
- AI が研究レベルの数学を生み始めている一方で、人間側の数学的理解力を育てる制度が弱体化しており、この組み合わせは戦略的に危うい
- 数学的理解力は「定理を作る能力」ではなく、世代をかけて築かれるインフラであり、失われれば簡単には再建できない
- 重要な意思決定に関わる AI には、推論の要点を 形式的・機械検証可能な形で公開する義務 を課すべきである
という内容です。アメリカにおいて、数学の教育や研究にかける予算を削減して、AIの研究に予算を回しているという方針がとても危険ではないか、という主張です。共感しました。
<おまけのひとこと>
今日は「数学セミナー」8月号の発売日です。特集の「この夏に楽しみたい数学ゲーム」がとても楽しみです。
7月11日(土) 「数学セミナー」8月号
「半減ニム」のつづきはちょっとお休みです。
「数学セミナー」8月号が発売になりました。早速入手しました。

|
| 「数学セミナー」8月号 |
「あやとりの楽しみ」第29回はグラフ理論のグラフをあやとりで作ってみるという内容です。

|
| 「あやとりの楽しみ」第29回 |
こちらのサポートページに画像などを載せています。ご覧いただけたらと思います。
|
|
|
|
|
特集の「この夏に楽しみたい数学ゲーム」は著者の先生方はいろいろなところでお名前をお見掛けする馴染み深い方々で、期待通り面白かったです。学校数学を冒険しよう、という連載の「距離の個数と三角形・四角形」(篠原雅史先生)は、以前自分でも考察したことがある内容で、興味深く読ませていただきました。
「京都大学総合博物館特別展「夢幻のかたち」を振り返って」(立木秀樹先生、松浦昭洋先生)は、2025年7月30日〜8月31日に開催された特別展に関する記事でした。昨年8月に、この特別展を見学することを主目的として、京都・奈良・大阪にプライベートで2泊3日の旅行をしました。たいへん印象深い内容でした。ほとんど写真を撮っていなかったことに驚きました。ここのミュージアムショップでの買い物をはじめ、この旅行で入手したものは収穫が多くて楽しかったです。
一昨日から組合せゲームについて書き始めましたが、用語などを確認したくて、持っている書籍のなかで関係しそうなことが書いてあるものを本棚から取り出してみました。

|
| 組合せゲームに関係しそうな本 |
「すっかり忘れていたけれど、この話題はこの本に載っていたんだった(自分はこの本でこの内容を知ったのだったなあ)」と思うことがいくつもありました。
<おまけのひとこと>
本業のほうでもプライベートのほうでも、読んで考えて整理しておきたいことがいろいろたまっています。やることがあるのはありがたいことだとは思います。「週末になんとかしよう」と思っていると、だいたい時間が足りなくて終わってしまいます。
7月12日(日) 半減ニム(その3)
「半減ニム」です。
木曜日からご紹介している「半減ニム」ですが、先日 arXiv に Two-pile and three-pile games of a new variant of Nim known as Halve Nim(Stephen C. Locke, Stephen J. Curran, Richard M. Low:2026年6月29日) という論文があったのをざっと読んでみたのです。「ニムのバリエーションである半減ニムの、二山と三山のゲーム」というタイトルです。従来のニムは完全に解析されていて、初期状態を決めれば先手必勝なのか後手必勝なのか明らかなのですが、この論文では Halve Nim(半減ニム) という新しいルールを追加したニムのゲームについて調べてみた、という内容です。
二山について、p-position(自分の手番で石を取った結果、この状態を作れれば勝ち)はこうなっています、という図を示しました。
|
| 図 2:二山の半減ニムの p-position |
論文では、二山の半減ニムのp-position についてはこう書かれています。
二山の半減ニム(Halve Nim) の山の大きさを a,b とする。片方の山の大きさが a のとき、p-position になる b は、
|
aとbがそれ以下の場合は、以下の表のように p-position が記されています。 a=b の部分を黄色でマークしてみました。
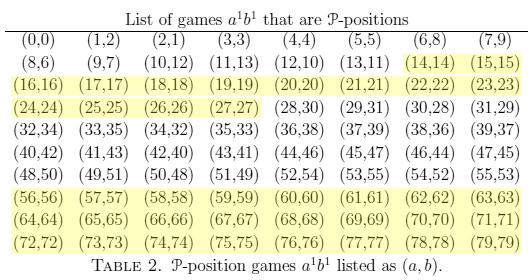 |
| 二山の半減ニムの p-positionの表(論文より) |
“7・22n-1 ≦ a < 7・22n のとき” ということで、n=1 のときは b=a になるのは 14 ≦ a < 28、n=2 ならば 56 ≦ a < 112 です。(表は79までですが。)「半減操作」という破壊的な手を選択できるというルールなのですが、通常のニムと同様に排他的論理和を用いた p-position の求め方が確立できたというのはとても面白いです。
山が3つになるとさらに大変になっています。(すみません詳しく読んでいません。)著者らは、三山については1つの山の個数を最大10個までと制限を設けて、一つの山がゼロの場合(これは二山のことです)、1の場合、2の場合…と10までを調べたということです。
 |
| 三山の半減ニムで、1つの山が1の場合の残り二山の p-positionの表(論文より) |
 |
| 三山の半減ニムで、1つの山が2の場合の残り二山の p-positionの表(論文より) |
ちなみに p-position の反対は n-position です。 p は previous player win 、n は next player win を表すそうです。p-position は、その状態(局面)を作ったプレーヤーが勝つ、つまりその局面の前にプレイしたプレーヤーが勝つので previous で、p-position を前にしてこれから自分の手を打たなければいけない次のプレーヤー (next player) は負けるのです。
これまで、学術論文の内容をざっと理解したいときは notebookLM を活用していました。今回、関連論文を検索していたら Moonlight という論文を読むためのAIツールのページにたどり着いて、使ってみたのです。これ、かなり良いなあと思いました。notebookLM も便利な機能がたくさんあるので今後も使います。特に複数の情報源の内容を合わせて整理するときには有効だと思います。一方で、特定の論文を読み込むときには moonlight は便利そうです。無償利用だと週に3本の論文までしか扱えませんが、厳選した論文を読むだけなら3本あればまあなんとかなるかなと思っています。
今回は趣味の論文で moonlight の実力を感じることができたので良かったですが、本業のほうの論文を読むのに使うことが多くなりそうです。
<おまけのひとこと>
パズルのような立体図形の問題を思い付いて、いろいろ考えてみています。明日からのこのページのトピックにしようかなと思っています。
7月13日(月) 正四面体の表面上の最短経路(その1)
立体図形の問題です。
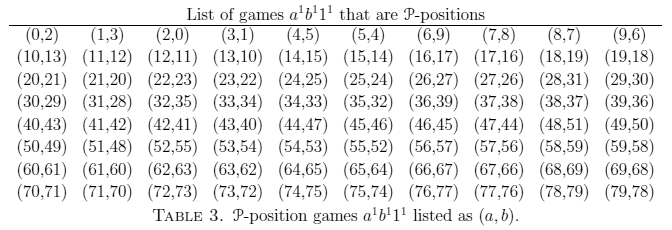
正三角形4面から成る正四面体を考えて、その表面に2点 P, Q を取ります。アリが点Pから点Qまで、正四面体の表面を歩いていくとして、最も歩く距離が短くなるような経路を最短経路もしくは測地線と呼びます。
P,Qが同じ面にある場合は下の図のようにその面内でP,Qを結ぶ直線が最短経路になるでしょう。
 |
| P,Q が同じ面にある場合の例 |
P,Qが異なる面にある場合、正四面体は任意に選んだ2つの面はかならず隣接していますので、例えば下の図のように辺(稜)を乗り越えて折れ曲がった線になるでしょう。
 |
| P,Q が違う面にある場合の例 |
まずは点P, Q は正四面体の面の内部にあり、辺や頂点には重ならないことにしましょう。そのうえで、以下のような問題を考えてみたのです。
|
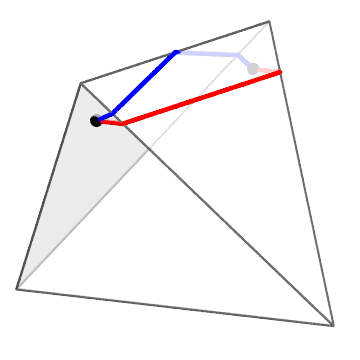
最後の問題ですが、点Pもしくは点Qが正四面体の頂点と一致しても良いことにすると、例えば以下のようにPが頂点、Qが相対する面の中心にあったとすると、最短経路は3本あり、これらは3回回転対称で同じかたちの経路になっています。
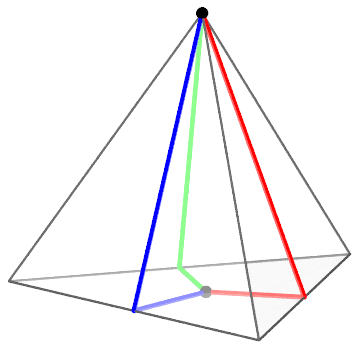 |
| Pが正四面体の頂点、Qがその対面の中心にある場合 |
こうではなく、PもQも頂点や辺ではなく、いずれかの面内にあるという条件で考えてください。
ブックオフで、もの思う鳥たち 鳥類の知られざる人間性(バーバー,T.X.(セオドア・ゼノフォン) (著) , 笠原敏雄 (訳):2008年)という本を買いました。(ごめんなさい220円でした。)原著は1993年発行のようです。

|
| 「もの思う鳥たち」 |
賢い鳥の暮らしぶりが描写されていて、鳥の話が好きな私は喜んで読みました。訳者後記に、「キリスト教文化圏では、動物はどの個体も基本的にはすべて同一で、個性や主体性などはなく、ましてや人間的な特性などあるはずもないので、擬人的な表現というものを比喩的に使う以上のことは許されないのです」と書かれていて驚きました。
有名な「ソロモンの指輪」というコンラート・ローレンツ博士の本があります。カラスやガンとの心温まる交流が記されていたと思います。何度も読み返したとても好きな本でした。(改めて自分の本棚を眺めてみたら見当たらなくて驚いています。いつ失くしてしまったんだろう…)ローレンツ博士は1973年にノーベル生理学・医学賞を受賞されていて、評価されていなかったとは思えません。
とはいえ、かつてのキリスト教の価値観では人間は他の生物とは異なる特別な存在で、自然は人間が支配して活用するもの、という考え方だったのだと思います。東洋の思想や価値観とは違います。でも現在では「動物は個性や感情や主体性を持つ」という価値観が主流になっていると思います。なので動物倫理という考え方が強く主張されるようになってきているのだと思います。
<おまけのひとこと>
一週間が始まります。
7月14日(火) 正四面体の表面上の最短経路(その2)
立体図形の問題です。
昨日、こんな問題を考えてみました。
正四面体の面の上に2点 P, Q を取ります。ただし P,Q は辺(稜)や頂点には重ならないものとします。
|
まず1番目ですが、P,Qが同じ面に含まれるとき、PQの最短経路がその面を出ることはありません。一般に凸多面体の測地線は、「自己交差することはなく、同じ面を2回通ることはない」ことが証明されているそうです。(引用元の文献を探しているのですが、まだたどり着いていません。)P,Qが同じ面にあるのに測地線が他の面を通るとすると、測地線がPから他の面に出てゆくときと、他の面からQに入ってくるときの2回、P,Qを含む面を通ることになるため「同じ面を2回通らない」という測地線の条件に反します。なので、正四面体に限らず任意の凸多面体において、P,Qが同じ面にあるならば測地線はその面内でPQを結ぶ直線になります。
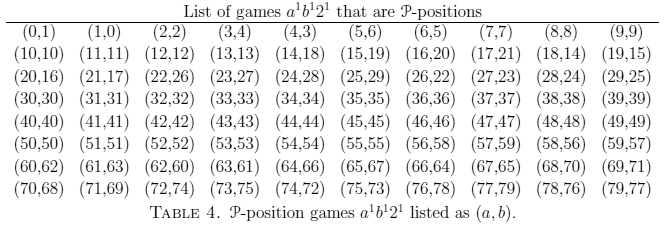
次に2番目です。P,Qが異なる面にあるとき、いったんPもQも含まない面を通ったほうが距離が短くなる場合があるのです。例えば下の例ですが、青い経路はPとQを含む面のみを通る条件では最短なのですが、それよりもPもQも含まない面を通り過ぎる赤い経路のほうが短いのです。
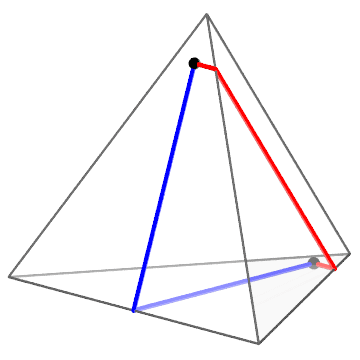 |
| 最短経路が三面を通る例(青より赤のほうが短い) |
3番目の「4面すべてを通る例はあるか?」ですが、それは存在しないことが示されているそうです。下の青い経路はP,Qを結んで4面すべてを通っている経路なのですが、残念ながら最短ではありません。(下の2つの図は、正四面体の向きや姿勢を変えてみたもので、点と経路は同じです。)
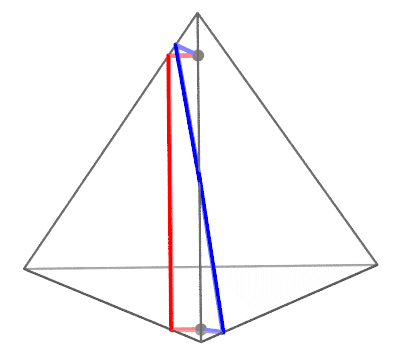 |
 |
|
| 最短経路が4面すべてを通るP,Qの配置は存在しない | ||
今日の例を見ると、残りの4番目、5番目、6番目の問いの答えがイメージできるのではないかと思います。
正四面体の模型を作って、点P,Qの位置に穴をあけてゴム紐を通して固定すれば、最短経路とか局所的な最短経路のところで安定しそうだな、と思うのです。上の図で4面すべてを通っている青い経路は最短経路ではないですけれども、その状態にゴム紐を持っていけば、勝手に(最短経路の)赤い経路に遷移したりしないでそのままとどまっていると思うのです。
最初に長いゴム紐を取り付けて、それをだんだん正四面体の内部に引っ張り込んで外に出ている部分を短くしてゆくと、複数存在する極小値に落ち着くはずです。弾性体の物理シミュレーションをしたら、最後は減衰振動して極小値の姿勢で安定すると思うのです。AIにプログラムのコード生成を頼めばやれるのでしょうか。まあでもイメージできるのでやらなくてもいいかなと思いました。
先日、「大山」(だいせん)というお酒を見かけて買ってみました。ウィスキーベースの梨の香りがするリキュールです。

|
| 「大山」 |
飲みやすくて3日くらいで空けてしまいました。しばらくはリピート買いはしないと思います。
<おまけのひとこと>
「山」の漢字を「せん」と読む例は少ないと思います。にんべんがついた「仙」ならば、「せん」としか読まないと思います。仙人とか仙台くらいしか思いつきませんが。
7月15日(水) 創作あやとり作品「太陽」
あやとりです。
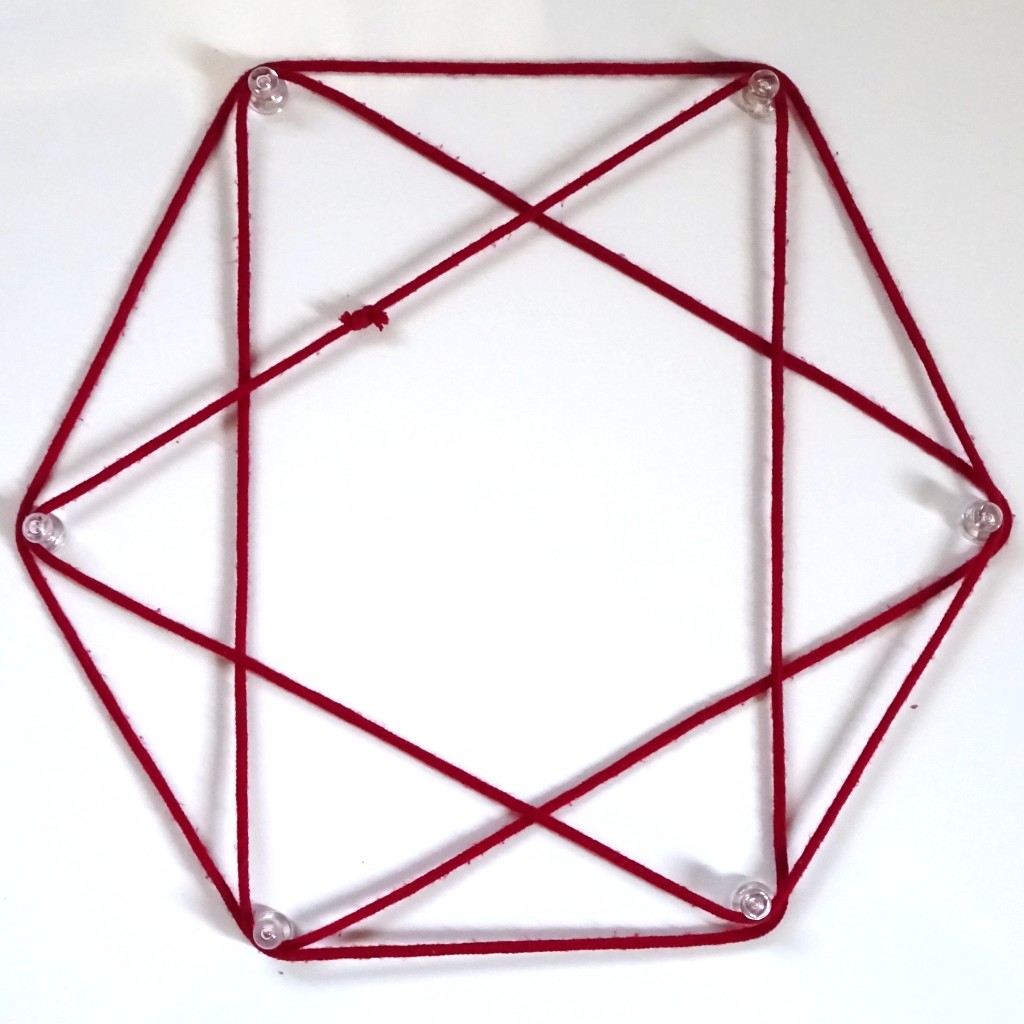
Felix R. Paturiさんの現代創作あやとり作品の太陽(リンクは石野さんの「あやとりしてみよう」の該当ページです)を取ってみました。糸の長さの都合もあって、最後の仕上げは省略しています。

|
| 「太陽」(1988 Felix R. Paturi) ※最後の「親指で二重ナバホ、小指で逆ナバホ」を省略しています |
中心にできる八芒星のパターンが「太陽」なのかなあと勝手な想像をしています。この作品は「アンドロメダ」をはじめとしたPaturiさんの天体の名称が付けられた一連の作品のひとつで、これら一連の作品はおなじ文献で紹介されています。
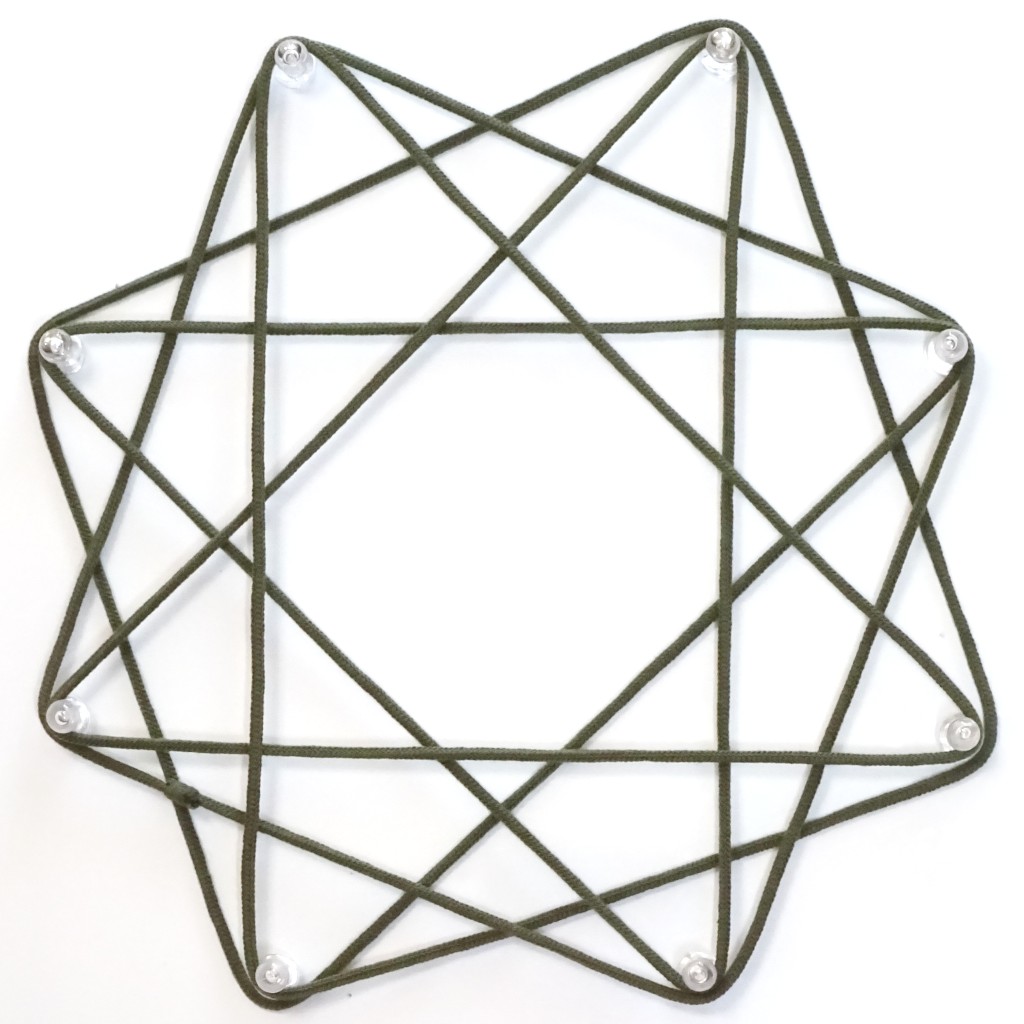
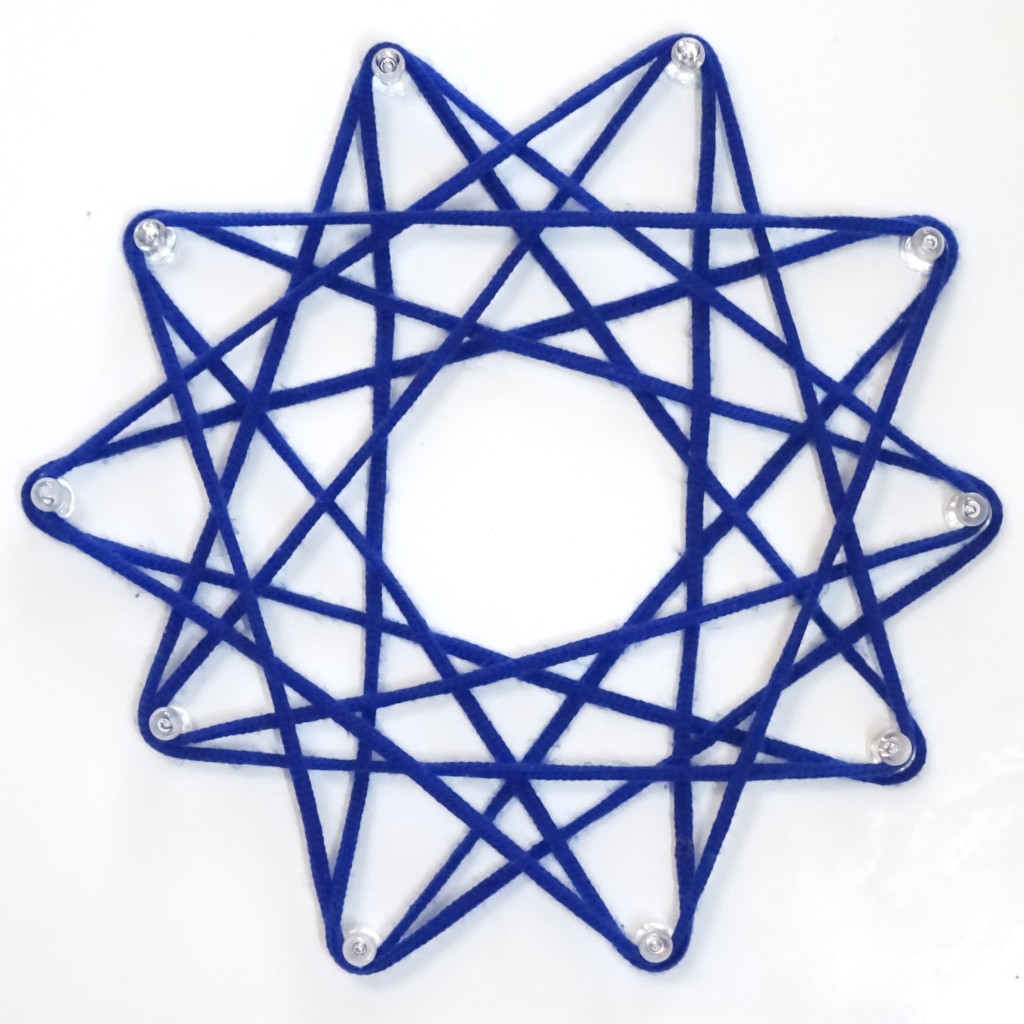
八芒星といえば、2022年12月2日にこんな創作をご紹介していました。
|
| hh221202-1a |
明らかに同じ系統の作品なのですが、当時はPaturiさんの「太陽」を知りませんでした。「太陽」の文献の手描きの完成図は見ていたと思うのですが、中央のパターンを意識していませんでした。私が取ってみたものよりPaturiさんの「太陽」のほうが美しいですね。当時は仕上げの調整が雑だった、ということはありますけれども。
<おまけのひとこと>
2021年から2023年ころはあやとりの手順の順列組合せをいろいろ試して、できたかたちを日々掲載していました。最近はある程度まとめて整理することを心がけています。